





ATMO (Aerally Transforming Morphobot) представляет собой усовершенствованную версию предыдущей разработки Caltech - робота M4. Главное отличие заключается в способности трансформироваться ещё во время полёта, а не только после приземления.
Обычные дроны-трансформеры сначала приземляются, и только затем складывают пропеллеры в колёса. Но такая схема часто даёт сбои при посадке на неровную поверхность. ATMO решает эту проблему, начиная трансформацию ещё в воздухе и приземляясь с уже почти сформированными колёсами.
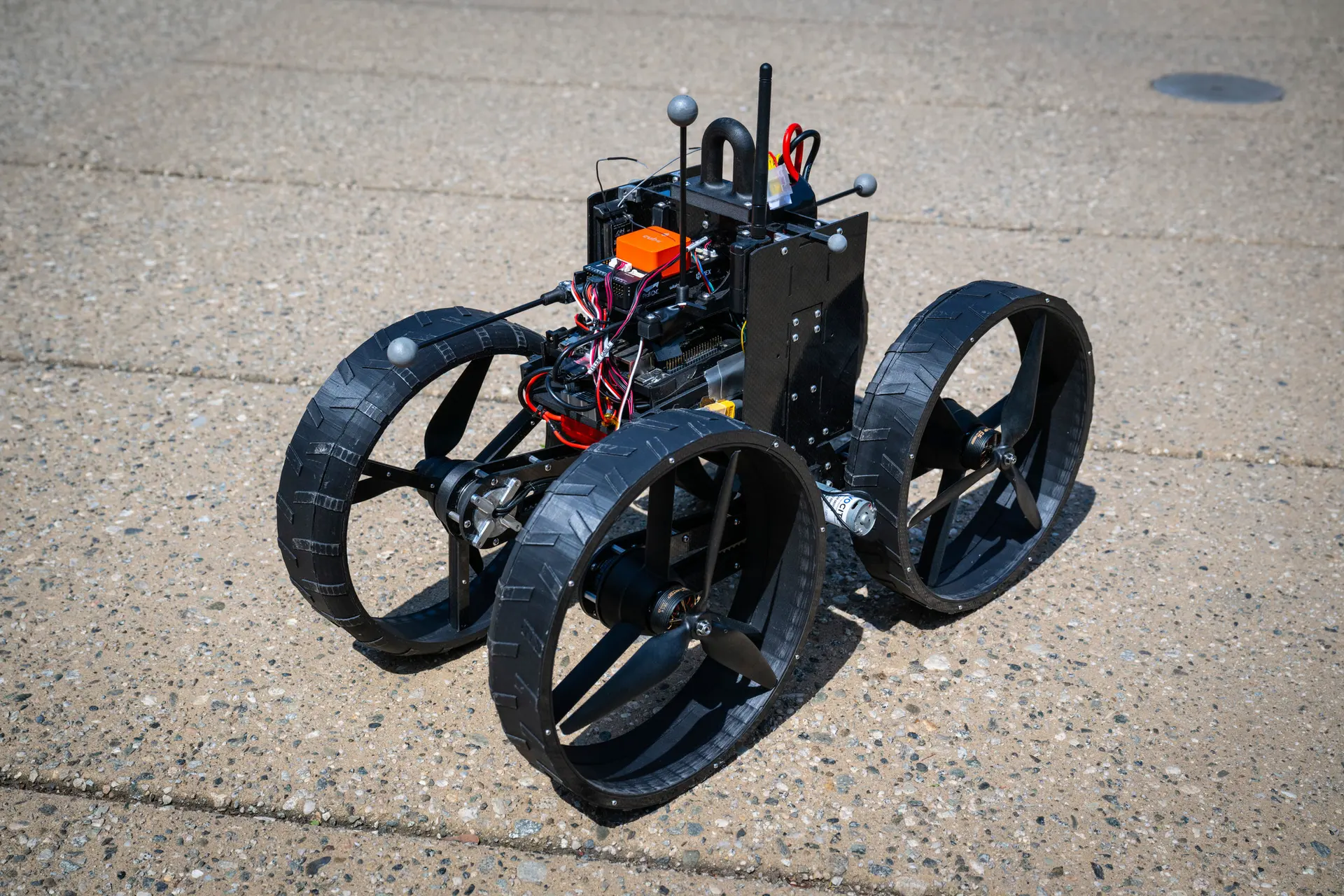
Конструкция ATMO включает один центральный мотор для трансформации и четыре отдельных - для полёта. Однако при изменении положения пропеллеров возникают сложные аэродинамические эффекты. Потоки воздуха начинают отклоняться от земли, что может привести к потере устойчивости.

Для решения этой проблемы инженеры разработали специальный алгоритм управления, который в реальном времени корректирует мощность каждого пропеллера. Это позволяет роботу сохранять стабильность при любом положении трансформирующихся элементов. После приземления ATMO превращается в полноценный вездеход с ременным приводом и дифференциальной системой управления.
Как отмечает ведущий разработчик Иоаннис Мандралис, главным достижением стала способность системы мгновенно адаптироваться к изменяющимся динамическим условиям. Такая технология открывает широкие возможности для использования гибридных роботов в спасательных операциях, разведке местности и доставке грузов в труднодоступные районы.
Хотя ATMO пока остаётся экспериментальной разработкой, его успешные испытания демонстрируют перспективность концепции летающих вездеходов. В будущем подобные системы могут найти применение в самых разных областях - от научных исследований до коммерческих перевозок.







