




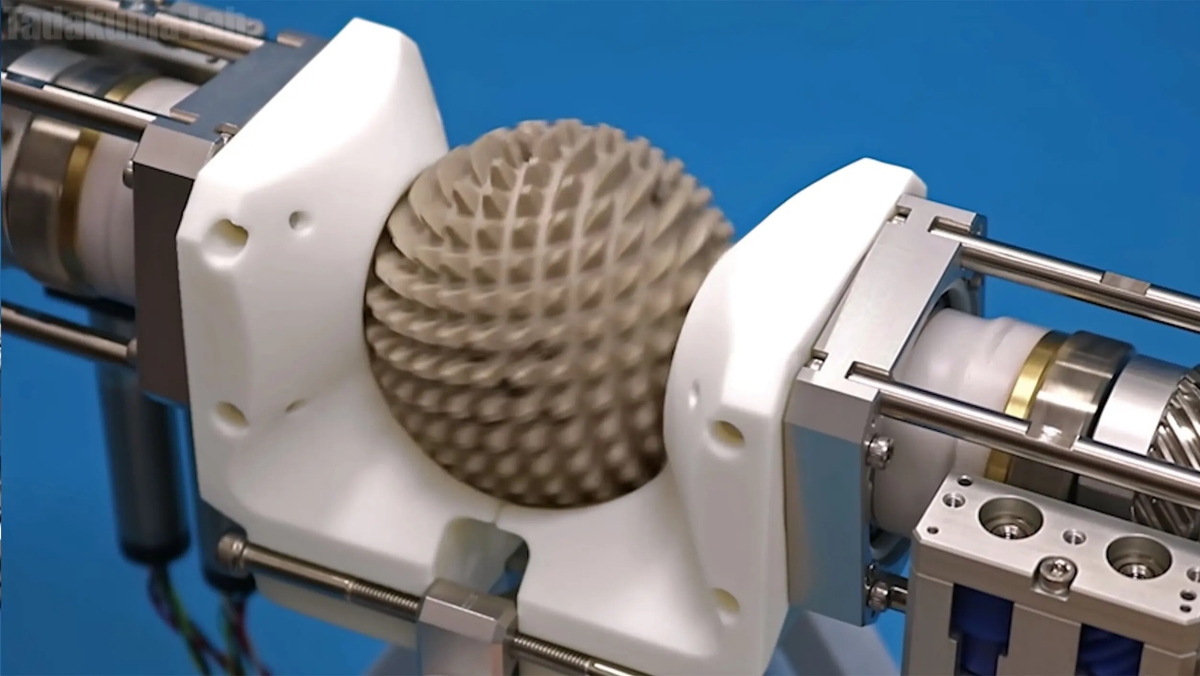
Cистема, разработанная в Университете Ямагата в Японии, базируется на простой кросс-сферической передаче, которая вместе с монопольной передачей управляет движениями вроде наклона, поворота и вращения. Это аналогично тому, как работает плечо у человека, обеспечивая полный спектр движений. Благодаря умным передачам и механизму скольжения, ABENICS обеспечивает исключительную точность управления движениями.
Добавив вторую монопольную передачу и дифференциалы, система становится еще более мощной. Операторы могут контролировать движения с высоким крутящим моментом и невероятной точностью. Если к системе присоединить, например, руку или ногу, можно добиться очень реалистичных и плавных движений, что крайне полезно для робототехники. Обычно для управления плечом робота используют несколько двигательных узлов: один для движения вверх-вниз, другой — для вперёд-назад, а третий — для вращения. ABENICS объединяет все эти функции в одном компактном суставе.
Пока этот тип передач не нашел широкого применения ни в коммерческой, ни в медицинской, ни в промышленной сфере. В основном его исследуют в научной среде, но потенциал технологий ABENICS для будущего огромен — там, где требуется высокая точность и свобода трёхмерного движения, эта система может стать революцией.
Представьте, что роботы с такими суставами могут совершать: хирурги смогли бы выполнять сложнейшие операции с ювелирной точностью, а стоматологи — проводить процедуры с абсолютным контролем. Космические аппараты, оснащённые такими манипуляторами, могли бы собирать лунные базы или чинить космические станции. Даже марсоходы с такими "руками" могли бы действовать гораздо эффективнее.
Перспективы использования ABENICS поражают воображение. Система открывает двери для множества областей, где необходима высокая точность и подвижность. И даже в повседневной жизни можно представить, как с такой технологией мы бы выигрывали больше мягких игрушек в автоматах с "когтями".







