





Но у хвостов раскрылась еще одна интересная функция: гекконы также используют свои хвосты, чтобы помочь восстановить равновесие, когда они падают с дерева головой вперед.
Эти падения головой, вероятно, не являются отдельным методом для быстрого спуска геккона, однако ученые задокументировали много таких жестких посадок, используя высокоскоростные видеокамеры для записи их траекторий и приземлений, вызывающих восхищение. Скорость такого падения около 6 метров в секунду, или 21 километр в час — более 120 длин тела геккона в секунду.
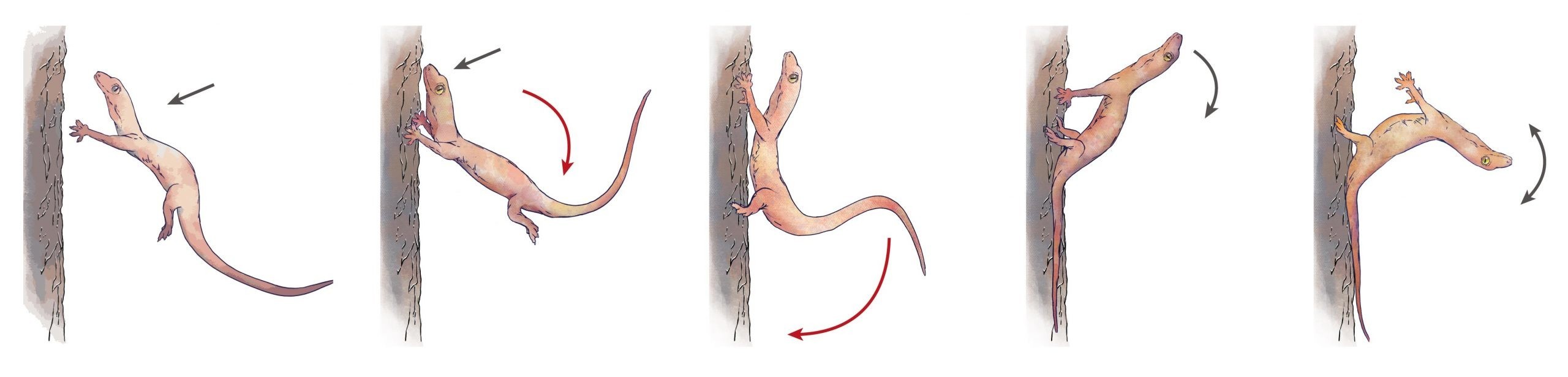
Обычный азиатский плоскохвостый домашний геккон, Hemidactylus platyurus сталкиваясь с деревом, хватается за ствол когтистыми и мягкими пальцами ног, так что, когда его голова и плечи отскакивают, он прижимает хвост к стволу, чтобы не упасть на землю и, возможно, не превратиться в чей-то обед. Исследователи отмечают, что структуры, похожие на хвосты геккона, могут использоваться для стабилизации летающих роботов, таких как дроны, когда они приземляются на вертикальные поверхности.
По словам ученых, это необычное поведение, которое они первыми задокументировали, математически смоделировали и воспроизвели в мягком роботе, является примером того, как эволюционное новшество, такое как хвост, можно использовать непредвиденным образом.
Они построили хвостатого робота из деталей, сделанных на современном 3D-принтере Carbon M2, специально разработанном для печати мягких структур. Лапы были снабжены липучками, которые держались при контакте, а к хвосту они добавили механизм, который заставлял его давить вниз, когда передние лапы ударялись о поверхность и скользили, как рефлекс хвоста геккона.

Удивительно, но хвостатый робот добился успеха при жестких посадках. В дикой природе 87% гекконов с хвостами успешно приземлились на вертикальную поверхность, не упав, в то время как бесхвостые гекконы падали чаще. Бесхвостым роботам удавалось успешно приземлиться на вертикальную поверхность только в 15% испытаний по сравнению с 55% испытаний с участием хвостатого робота.
Исследователи также обнаружили, что более длинные хвосты не обязательно намного лучше, чем более короткие хвосты: роботы с хвостами, составляющими лишь половину длины головы и тела вместе взятых, были почти так же успешны, как и те, у которых были полноценные хвосты. Однако короткохвостым роботам требовалось вдвое больше усилий, чтобы оставаться прикрепленными к дереву.
Команда продолжит работу над развитием технологи и, возможно, в ближайшем будущем предложит ее крупным технологическим компаниям в качестве основы для более продвинутых роботов-помошников или механизмов специального назначения.






