Наше восприятие своего тела не всегда правильное или реалистичное, как знает любой спортсмен или следящий за модой человек, но это решающий фактор в том, как мы ведем себя в обществе. Ваш мозг постоянно готовится к движению, пока вы играете в мяч или одеваетесь, чтобы вы могли двигаться, не ударяясь, не спотыкаясь и не падая.
Люди создают модели нашего тела в младенчестве, и роботы начинают делать то же самое. Команда Columbia Engineering сообщила, что они разработали робота, который впервые может изучить модель всего своего тела с нуля без какой-либо помощи человека. Исследователи объясняют, как их робот построил свою кинематическую модель в недавней статье, опубликованной в журнале Science Robotics, и как он использовал эту модель для планирования движений, достижения целей и избегания препятствий в различных сценариях. Даже повреждение его тела было автоматически обнаружено и исправлено.
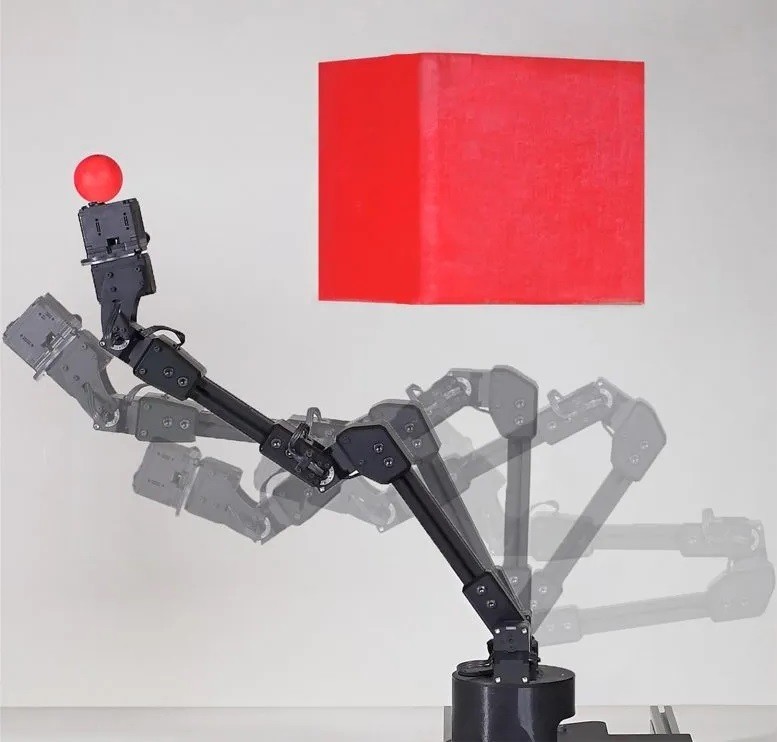
Исследователи поместили роботизированную руку в круг пяти видеокамер. Робот наблюдал через камеры за собой, свободно извиваясь. Как младенец, впервые исследующий себя в зеркальном зале, робот извивался и извивался, чтобы узнать, как именно двигается его тело в ответ на различные двигательные команды. Примерно через три часа робот остановился. Его внутренняя глубокая нейронная сеть завершила изучение взаимосвязи между двигательными действиями робота и объемом, занимаемым им в окружающей среде.
Достаточно любопытно было бы пронаблюдать, как робот постепенно осознает себя. Но вы не можете просто заглянуть в нейронную сеть — это черный ящик. После того, как исследователи боролись с различными техниками визуализации, образ себя постепенно возник. Это было что-то вроде мягко мерцающего облака, которое, казалось, поглотило трехмерное тело робота. Когда робот двигался, мерцающее облако мягко следовало за ним. Собственная модель робота была точна примерно до 1% его рабочего пространства.
Способность роботов моделировать себя без помощи инженеров важна по многим причинам: это не только экономит труд, но также позволяет роботу не отставать от собственного износа и даже обнаруживать и компенсировать ущерб. Авторы утверждают, что эта способность важна, поскольку нам нужны автономные системы, чтобы они были более самостоятельными. Например, заводской робот может обнаружить, что что-то движется неправильно, и компенсировать это или вызвать помощь.
Работа является частью многолетних исследований направленных на поиск способов наделить роботов некоторой формой самосознания. Самомоделирование — это примитивная форма самосознания. Если у робота, животного или человека есть точная модель себя, он может лучше функционировать в мире, принимать более правильные решения и иметь эволюционное преимущество.
Исследователи знают об ограничениях, рисках и противоречиях, связанных с предоставлением машинам большей автономии за счет самосознания. Исследователи признают, что вид самосознания, продемонстрированный в этом исследовании, тривиален по сравнению с человеческим, но с чего-то нужно начинать. Мы должны двигаться медленно и осторожно, чтобы пожинать плоды и минимизировать риски.