Группа исследователей из Лондонского университета королевы Марии опубликовала исследование в журнале Advanced Intelligent Systems, в котором они представили новый тип электрической искусственной мышцы переменной жесткости с возможностью самоощущения. Это важный прорыв в области бионики, который может иметь революционный эффект на мягкую робототехнику и медицинские приложения.
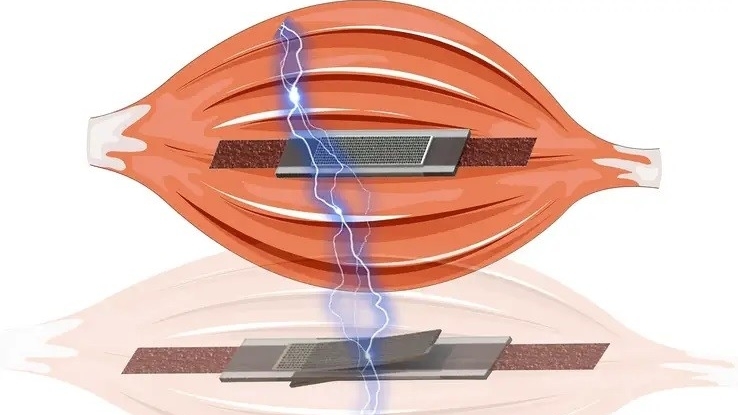
Вдохновленные природой, исследователи разработали искусственную мышцу, которая может плавно переходить от мягкого к твердому состоянию и обладает способностью ощущать силы и деформации. Это достигается благодаря использованию технологии переменной жесткости в искусственных мышечных приводах. Она позволяет роботам, особенно изготовленным из гибких материалов, иметь самоощущение и достичь бионического интеллекта.
Новая искусственная мышца, разработанная исследователями, обладает гибкостью и растяжимостью, схожей с естественными мышцами. Она идеально подходит для интеграции в сложные мягкие роботизированные системы и адаптации к различным геометрическим формам. Благодаря своей способности выдерживать растяжение до 200% по длине, эта искусственная мышца демонстрирует высокую долговечность.
С помощью различных напряжений искусственная мышца быстро регулирует свою жесткость, обеспечивая непрерывную модуляцию с изменением жесткости более чем в 30 раз. Управляемая напряжением природа этой технологии позволяет достичь высокой скорости отклика по сравнению с другими типами искусственных мышц. Это также упрощает механизмы управления, устраняя необходимость в дополнительных датчиках и снижая затраты.
Процесс изготовления самоощущающейся искусственной мышцы является простым и надежным. Комбинация углеродных нанотрубок и жидкого силикона создает тонкослойный катод, который служит искусственной мышце и ее чувствительной частью. Анод изготавливается из мягкого металла, а активирующий слой помещается между катодом и анодом. В результате получается самоощущающаяся искусственная мышца переменной жесткости.
Эта гибкая технология переменной жесткости имеет огромный потенциал в различных областях, включая мягкую робототехнику и медицинские приложения. Интеграция с человеческим телом может помочь людям с ограниченными возможностями или пациентам в выполнении повседневных задач. Носимые роботизированные устройства, оснащенные такой технологией, могут отслеживать действия пациента и оказывать сопротивление, регулируя уровни жесткости, что способствует восстановлению функции мышц во время реабилитационных тренировок.
Это исследование представляет важный шаг в развитии бионики и открывает новые перспективы для разработки мягких и носимых роботов. В будущем эта технология может быть использована для создания устройств, объединяющих человека и машину, и сделать их более функциональными.