.webp)
.webp)




COLDArm — это роботизированная и дистанционно управляемая рука, которая можетбыть установлена на стандартные разведовательные лунные апараты, главная особенность которой заключается в условиях работы. Рука позволит выполнять манипуляции при очень низких температурах, в том числе в лунную ночь, когда температура может опускаться ниже -173°С . COLDArm разрабатывается Лабораторией реактивного движения JPL в Южной Калифорнии.
Роботизированная рука, разработанная для лунного посадочного модуля, использует высокопроизводительную технологию обработки, используемую для Mars Helicopter (Ingenuity) и может выполнять различные задачи при экстремально низких температурах без необходимости в источнике тепла. Манипуляции включают такие вещи, как сбор и анализ лунного грунта, развертывание инструментов и фотографирование окрестностей посадочного модуля.
Текущие конструкции роботов-манипуляторов для лунных посадочных модулей требуют нагревателей, чтобы шестерни внутри манипулятора не подвергались перегрузке и поломке при воздействии экстремально низких температур в течение лунной ночи. В конструкции COLDArm используются специальные редукторы и контроллеры двигателей, которые могут работать при экстремальных температурах без необходимости нагрева и, таким образом, сохраняют мощность и массу для выполнения миссии.
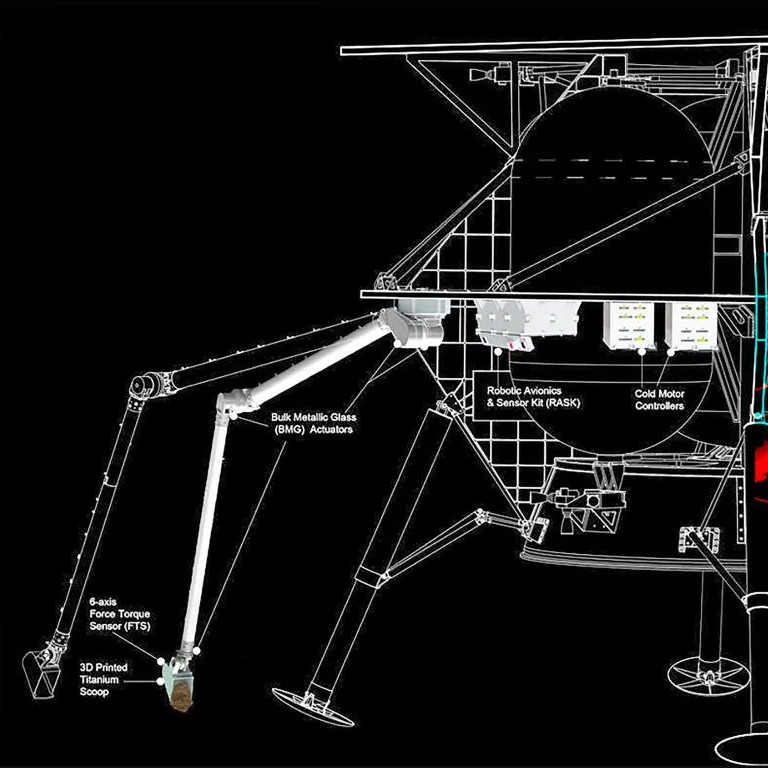
Подобно роботам-манипуляторам Mars Phoenix и Mars InSight, COLDArm имеет 4 степени свободы (подвижные суставы), имеет длину 2 метра и может создавать усилие около 4,5 килограмм. Датчик, встроенный рядом с "запястьем" руки, измеряет и регулирует величину силы, прилагаемой рукой во время любого конкретного движения, чтобы остановить руку, когда были встречены направленные нагрузки. Конец манипулятора будет оснащен камерами для 3D-картографирования, визуализации лунной поверхности и общих операций.
Команда COLDArm оценивает различные насадки и небольшие инструменты, которые потенциально могут работать на конце руки, в том числе титановый ковш, напечатанный на 3D-принтере, с функциями сбора геотехнических свойств лунного реголита. Это включает в себя работу с победителями конкурса NASA @Work "Be the Game Changer" и открытого для публики конкурса "Honey, I Shrunk the Payloads" для потенциальной интеграции их инструментов полезной нагрузки с COLDArm для будущей демонстрации.
В конечном итоге бортовой компьютер можно будет запрограммировать на автономное управление суставами рук для выполнения различных движений и сбора изображений и данных датчиков. Благодаря будущим разработкам программного обеспечения авионика COLDArm сможет обеспечить автономные операции в океанских мирах, таких как спутник Юпитера, Европа.
Шестерни COLDArm разрабатываются в рамках проекта Bulk Metallic Glass Gear. В рамках Программы инновационных исследований малого бизнеса NASA компания Motiv Space Systems, Inc. возглавляет разработку и производство контроллеров руки и двигателя для COLDArm. Демонстрация этих технологий позволит выполнять миссии в экстремальных условиях будущих лунных, марсианских и океанских миров.
В сентябре этого года на испытательном стенде Лаборатории реактивного движения, заполненном материалом для имитации лунного реголита (разбитая порода и пыль на Луне), COLDArm успешно завершила эксперименты , в ходе которых оценивалась его способность собирать данные о свойствах этого реголита. Теперь COLDArm был отправлен для завершения таких же строгих испытаний в космических условиях, с которыми сталкивается каждая миссия. Он нацелен на запуск в конце 2020-х годов.







