Миссия марсохода Curiosity от NASA уже 12 лет работает на Марсе, продолжая делать значимые открытия, пока медленно поднимается по склонам марсианской горы. Само по себе успешное приземление на Марс — задача не из лёгких, но миссия Curiosity пошла ещё дальше, применив инновационную технологию посадки под названием "небесный кран" при высадке 5 августа 2012 года.
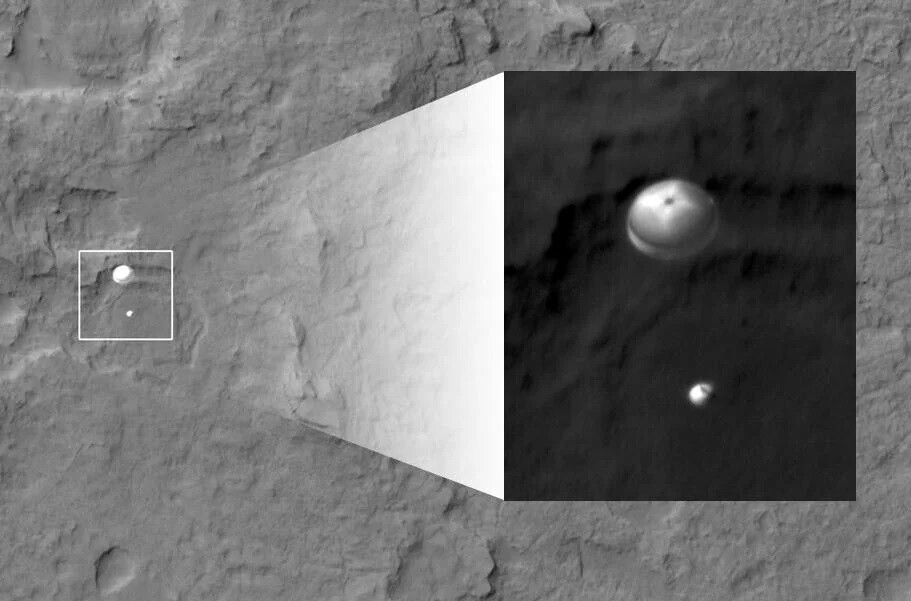
Этот манёвр стал возможен благодаря реактивному ранцу, который аккуратно доставил марсоход к поверхности, спустив его на тросах, а затем отлетел и совершил безопасную посадку на расстоянии от Curiosity.
Экипаж управления миссией, находившийся в Лаборатории реактивного движения NASA в Южной Калифорнии, пережил семь напряжённых минут ожидания перед тем, как наконец получить подтверждение успешного приземления и отпраздновать это событие.
Идея небесного крана возникла из-за того, что Curiosity оказался слишком массивным для традиционного способа посадки с использованием воздушных подушек, как это было у его предшественников. Этот новый метод также повысил точность посадки, что позволило сократить зону возможного приземления.
Эта технология позже была улучшена и использована при посадке марсохода Perseverance в 2021 году, добавив навигацию по рельефу местности, что позволило безопасно приземлиться в сложном регионе древнего озера, усеянном камнями и кратерами.
JPL работает над посадками на Марс с 1976 года, начиная с проекта Viking, где применялись дросселируемые двигатели для мягкой посадки. В 1997 году JPL предложили новый подход для миссии Mars Pathfinder: использование воздушных подушек, которые позволили безопасно доставить марсоход на поверхность, даже если он несколько раз подпрыгнул после приземления.
Этот метод хорошо показал себя и был применён снова в 2004 году при посадке марсоходов Spirit и Opportunity. Однако было ясно, что для более крупных аппаратов, таких как Curiosity, нужны новые технологии, которые позволят безопасно приземляться в более сложных регионах.
В начале 2000-х инженеры начали разрабатывать «умные» системы посадки, включающие новые радары и двигатели, способные управлять спуском аппарата и маневрировать, избегая опасностей. Именно так и родилась концепция небесного крана.
Идея размещения реактивного ранца над марсоходом, а не под ним, изначально вызывала недоумение у многих, ведь традиционно двигатели всегда располагались снизу. Однако этот подход оказался эффективным: он минимизировал риск повреждения поверхности под марсоходом и позволил сразу поставить его на колёса, избавляя от необходимости использовать дополнительное оборудование для высадки.
Вдохновлённые вертолётами-кранами, инженеры разработали систему, которая смогла контролировать раскачивание марсохода при спуске на тросах, обеспечив его стабильное приземление.
Эта технология оказалась не только успешной, но и универсальной — её можно адаптировать для более крупных аппаратов на Марсе или в других местах Солнечной системы, что открывает новые возможности для будущих миссий.
_large.webp)