В 1959 году бывший физик из Корнелла Ричард Фейнман прочитал свою знаменитую лекцию "There’s Plenty of Room at the Bottom" (Там внизу полно места), в которой он описал возможность уменьшения любых технологий, от машин до компьютерных микросхем, до невероятно малых размеров. Что ж, "внизу" стало намного теснее.
Исследователи из Корнелла и Пенсильванского университета совместно со специалистами из дружественных научных центров создали первых микроскопических роботов, которые включают в себя полупроводниковые компоненты, что позволяет управлять ими — и заставлять ходить — с помощью стандартных электронных сигналов.
Эти роботы размером примерно с Инфузорию-туфельку служат шаблоном для создания еще более сложных версий, использующих интеллект на основе кремния, которые могут производиться массово и когда-нибудь смогут путешествовать сквозь ткани и кровь человека.
Исследование возглавили Итаи Коэн, профессор физики, Пол МакИуэн, профессор физики Джона А. Ньюмана из Колледжа искусств и наук, а также их бывший научный сотрудник Марк Мискин, который сейчас является доцентом в Пенсильванского университета. Результатами своей работы они поделились в журнале Nature.
Создание роботов в микронном масштабе — непростая задача, особенно когда речь идет о разработке небольших приводов — двигателей, которые позволяют роботам двигаться. Обычные приводы не работают в таком маленьком масштабе, а новые приводы, которые действительно работают, используют такие механизмы, как магнетизм, и их трудно интегрировать с традиционной кремниевой микроэлектроникой. Теперь группа исследователей разработала новый тип исполнительного механизма, который работает с электронным управлением и который может быть встроен непосредственно в цепь, управляющую им. Это открывает двери для последних 50 лет исследований в области микроэлектроники, которые могут быть внедрены в роботов, настолько маленьких, что их невозможно увидеть человеческим глазом.
Шагающие роботы — это последняя итерация и во многом эволюция предыдущих наноразмерных творений Коэна и МакИуэна, от микроскопических сенсоров до машин оригами на основе графена .
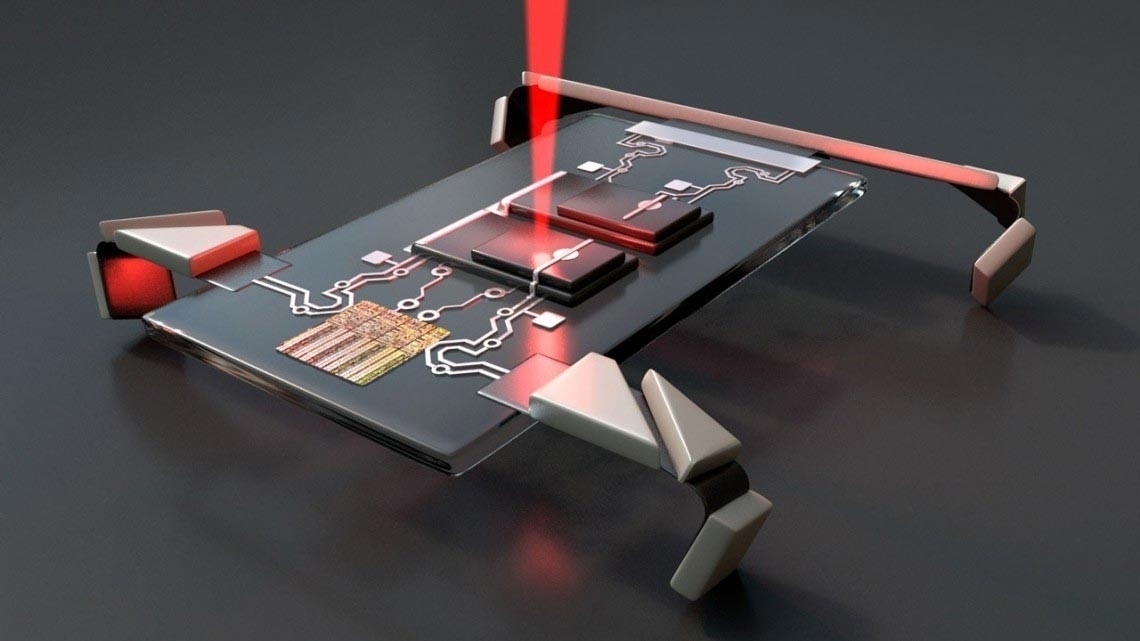
Новые роботы имеют толщину около 5 микрон (0,05 мм), ширину 40 микрон и длину от 40 до 70 микрон. Каждый бот состоит из простой схемы, изготовленной из кремниевых фотоэлектрических элементов, которые, по сути, функционируют как торс и мозг, и четырех электрохимических приводов, которые функционируют как ноги.

Какими бы простыми ни казались крошечные машины, создание ног было огромным подвигом.
Используя осаждение атомного слоя и литографию, команда построила ножки из полос платины толщиной всего в несколько десятков атомов, покрытых с одной стороны тонким слоем инертного титана. При приложении к платине положительного электрического заряда отрицательно заряженные ионы адсорбируются на открытой поверхности из окружающего раствора, чтобы нейтрализовать заряд. Эти ионы заставляют открытую платину расширяться, что приводит к изгибу полосы. Ультратонкие полосы позволяют материалу резко изгибаться, не ломаясь. Чтобы помочь контролировать трехмерное движение конечностей, исследователи нанесли узор на жесткие полимерные панели поверх полос. Зазоры между панелями функционируют как колени или лодыжки, позволяя ногам сгибаться контролируемым образом и, таким образом, генерировать движение.
Исследователи управляют роботами, мигая лазерными импульсами на разных фотоэлектрических элементах, каждый из которых заряжает отдельный набор ног. Переключая лазер вперед и назад между передней и задней фотовольтаикой, робот ходит.
Роботы, безусловно, высокотехнологичны, но они работают с низким напряжением (200 милливольт) и малой мощностью (10 нановатт), хотя они довольно прочны и надежны для своего размера. Поскольку они изготавливаются с помощью стандартных литографических процессов, их можно производить параллельно: около 1 миллиона ботов умещаются на 4-дюймовой кремниевой пластине.
Исследователи изучают способы дополнить роботов более сложной электроникой и бортовыми вычислениями — улучшения, которые в один прекрасный день могут привести к тому, что рои микроскопических роботов будут ползать и реструктурировать материалы, или накладывать швы на кровеносные сосуды, или массово отправляться для исследования больших участков человеческого мозга.