Подумайте о том, что вы делаете руками, когда вечером находитесь дома с пультом от телевизора или когда ужинаете вне дома и держите в руках различную посуду и стаканы. Эти возможности основаны на прикосновении, что позволяет вам перемещаться по телепрограмме или делать выбор в меню, не отрывая взгляда от экрана. Наши руки и пальцы — невероятно талантливые инструменты, обладающие высоким уровнем чувствительности.
Роботы стали более ловкими благодаря прогрессу в сенсорных технологиях и методах машинного обучения. Исследователи долгие годы старались достичь идеальной ловкости в роботизированных руках, чтобы те могли выполнять более сложные задачи, такие как сборка, вставка и упаковка. Однако, благодаря новым технологиям, роботы теперь могут значительно улучшить свои манипуляционные возможности.
Роботы стали еще более ловкими благодаря новой разработке из Columbia Engineering, где исследователи создали руку робота с развитым чувством осязания и моторными алгоритмами обучения. Команда продемонстрировала мастерство работы робота, выполняя сложную манипулятивную задачу - вращение объекта неровной формы, удерживая его в устойчивом состоянии. Рука успешно выполнила эту задачу без визуальной обратной связи и смогла постоянно изменять положение пальцев, чтобы удерживать объект в стабильном положении. Эта технология открывает новые возможности для роботов в выполнении более сложных задач в будущем.
Таким образом, новая разработка из Columbia Engineering позволит роботам работать в условиях плохой освещенности и окклюзии, что открывает возможности для более сложных задач в реальном мире. Как отметил Матей Чиокарли, один из ведущих авторов проекта, возможные применения могут быть связаны с логистикой и погрузочно-разгрузочными работами, а также с передовым производством и сборкой на заводах.
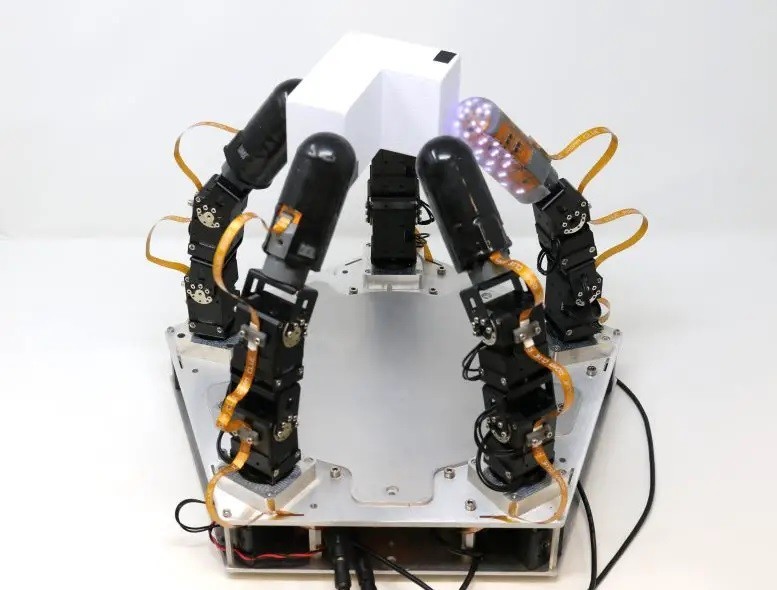
Исследователи спроектировали и построили роботизированную руку с пятью пальцами и 15 независимо активируемыми суставами — каждый палец был оснащен сенсорной технологией команды. Следующим шагом была проверка способности тактильной руки выполнять сложные манипуляционные задачи. Для этого они использовали новые методы моторного обучения или способность робота изучать новые физические задачи на практике. В частности, они использовали метод, называемый глубоким обучением с подкреплением, дополненный новыми алгоритмами, которые они разработали для эффективного изучения возможных двигательных стратегий.
Входные данные для алгоритмов моторного обучения состояли исключительно из тактильных и проприоцептивных данных команды без какого-либо зрения. Используя симуляцию в качестве тренировочной площадки, робот завершил примерно один год практики всего за несколько часов в режиме реального времени благодаря современным физическим симуляторам и высокопараллельным процессорам. Затем исследователи перенесли этот навык манипулирования, отработанный в симуляции, на настоящую руку робота, которая смогла достичь того уровня ловкости, на который надеялась команда.
В конечном счете, считают авторы работы, физический робот, который может быть полезен в реальном мире, нуждается как в абстрактном, семантическом интеллекте (чтобы концептуально понять, как устроен мир), так и в воплощенном интеллекте (навыке физического взаимодействия с миром). Большие языковые модели, такие как GPT-4 от OpenAI или PALM от Google, нацелены на обеспечение первого, в то время как ловкость в манипулировании, достигнутая в этом исследовании, представляет собой дополнительные достижения во втором.
Например, на вопрос, как приготовить бутерброд, ChatGPT в ответ напечатает пошаговый план, но для того, чтобы взять этот план и приготовить этот бутерброд, требуется ловкий робот. Точно так же исследователи надеются, что физически подготовленные роботы смогут извлекать семантический интеллект из чисто виртуального мира Интернета и эффективно использовать его в реальных физических задачах, возможно, даже в наших домах.