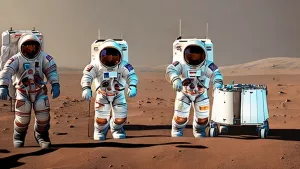
Исследователи из EPFL (Федеральной политехнической школы Лозанны) создали инновационную шарнирную руку, которая способна отсоединяться от основной роботизированной руки и ползать, чтобы самостоятельно захватывать предметы. Это решение было недавно представлено на Международной конференции по робототехнике и автоматизации (ICRA), и его осветил журнал IEEE Spectrum.
Обычно роботизированные руки стационарно закреплены на поверхности или конструкции для устойчивости, так как их скорость и сила требуют опоры. Это, конечно, ограничивает их подвижность. Цель команды EPFL состояла в том, чтобы разработать руку, способную к автономным действиям, которая могла бы при необходимости отделяться от основной роботизированной системы и захватывать предметы на расстоянии.

Роботы обычно созданы для одной задачи — удерживать вещи. Но для разработки руки, которая не только захватывает предметы, но и может сама передвигаться, исследователи использовали генетический алгоритм (основываясь на принципах естественного отбора и эволюции) и симулятор MuJoCo. Эти инструменты помогли учёным улучшить конструкцию, сделав её максимально эффективной.
В итоге команда выбрала оптимальное расположение пяти пальцев, которое напоминает строение человеческой руки. Каждый палец может сгибаться в разные стороны, что позволяет части пальцев использоваться для захвата предметов, а другим функционировать как "ножки", на которых рука перемещается. Рука также оборудована магнитным соединителем, благодаря которому она может отсоединяться и присоединяться к основной руке робота по необходимости.

Эта гибкость даёт устройству массу преимуществ. Когда рука остаётся прикреплённой к роботу, она способна одновременно поднимать несколько предметов, не тратя время на смену позиций. Её компактный размер делает её более маневренной по сравнению с роботами вроде Spot от Boston Dynamics, который передвигается на четырёх ногах. Хотя Spot уже оснащён собственной рукой для захвата, шарнирная рука может открыть новые возможности для исследований в узких или труднодоступных местах, куда обычный робот не сможет пробраться.