





В статье "Решение сложных задач сложных манипуляций с помощью оптимизации траектории и обучения с подкреплением" исследователи профессор Джованни Монтана и доктор Генри Чарльзуорт из WMG Университета Уорика разработали новые алгоритмы искусственного интеллекта — или "мозг", необходимые для того, чтобы научиться тому, как координировать движения пальцев и разрешать манипуляции.
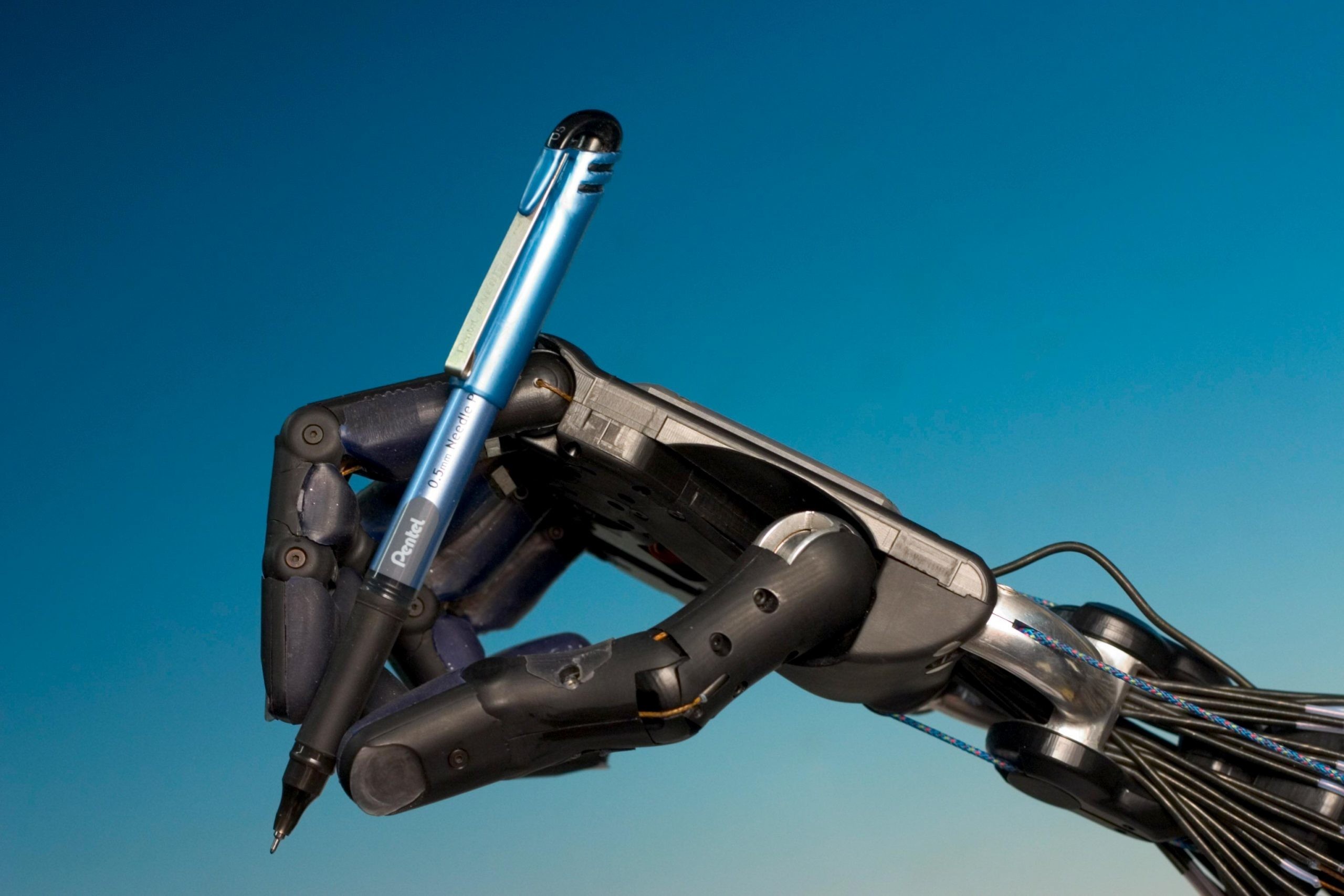
Используя физически реалистичное моделирование руки Shadow Robot, исследователи смогли заставить две руки проходить и бросать предметы друг в друга, а также крутить ручку между пальцами. Однако алгоритмы не ограничиваются этими задачами и могут изучить любую задачу, если ее можно моделировать. Трехмерное моделирование было разработано с использованием MuJoCo (Multi-Joint Dynamics with Contact), физического движка Вашингтонского университета .
Подход исследователей использует два алгоритма. Первоначально алгоритм планирования выдает несколько приблизительных примеров того, как рука должна выполнять конкретную задачу. Эти примеры затем используются алгоритмом обучения с подкреплением, который самостоятельно овладевает навыками манипулирования. Применяя этот подход, исследователи смогли добиться значительно лучших результатов по сравнению с существующими методологиями. Среды моделирования стали общедоступными для использования любым исследователем.
Теперь, когда алгоритмы оказались успешными в симуляциях, команда профессора Монтаны продолжит тесно сотрудничать с Shadow Robot и тестировать методологию ИИ на реальном роботизированном оборудовании, что позволит увидеть, как рука на шаг приблизится к использованию в реальной повседневной жизни. .
Во втором документе, который будет представлен на конференции NeurIPS 2021 года, исследователи WMG также разработали новый и общий подход ИИ, который позволяет роботам изучать такие задачи, как достижение и движущиеся объекты, что еще больше улучшит приложения для работы с руками.
Профессор Джованни Монтана из WMG, Университет Уорика, комментирует:
Будущее цифровизации зависит от алгоритмов искусственного интеллекта, которые могут учиться автономно, и иметь возможность разрабатывать алгоритмы, которые дадут руке Shadow Robot возможность работать, как настоящий, без участия человека. Эти автономные руки могут быть использованы в будущем для доставки хирургов-роботов, для увеличения производительности сборочных линий и для замены людей на опасных работах, таких как обезвреживание бомб.





.webp)

