С участием робота Федора пройдут все летные испытания нового пилотируемого корабля «Федерация». Об этом рассказали в Фонде перспективных исследований (ФПИ), где в рамках проекта «Спасатель» был создан первый российский антропоморфный киборг-космонавт.
После двух беспилотных миссий, в которых робот будет участвовать в одиночестве — в 2022-м и 2024-м году, Федор отправится на Международную космическую станцию (МКС) вместе с экипажем, где станет помощником космонавта.
По уровню научной новизны и прорывному характеру технических решений Федор конкурирует с лучшими мировыми разработками. Techdiver.ru рассказывает о пяти уникальных качествах отечественного андроида.
1. Математическая модель комбинированного управления.
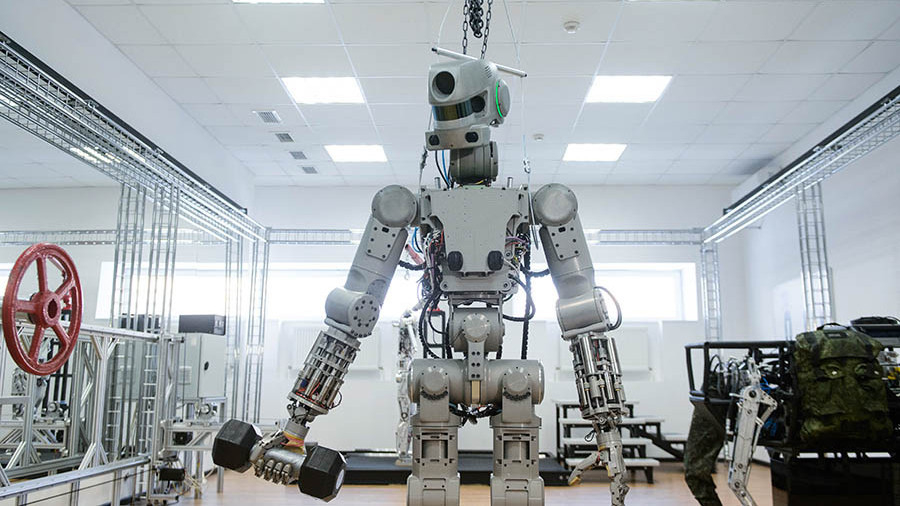
Робот Федор представляет собой антропоморфную робототехническую платформу. Управление ею может производиться и в автономном, и в комбинированном режиме, когда часть функций выполняется роботом автоматически, а часть задается оператором, причем не только с пульта управления, но и посредством естественных движений и жестов — с помощью специального «управляющего костюма».
«В основе этой системы лежит математическая модель комбинированного управления, не имеющая практических аналогов: ее особенностью является согласование физических и математических моделей тела человека, «управляющего костюма» и конструкции робота, — говорит руководитель проекта «Спасатель» Сергей Хурс. — Если отдельные разработки подобного рода и существовали до этого, замкнутой математической модели для антропоморфного робота ранее не было».
В рамках математической модели первое согласование обеспечивает пересчет показаний сенсоров «управляющего костюма» на модель тела человека, так как его суставы и шарниры механизмов робота не совпадают. Второе согласование устраняет различие конструкций «управляющего костюма» и робота.
Развитая сенсорная система робота включает силомоментные датчики, информацию от которых необходимо передать на тело оператора в виде внешних нагрузок, давая ему представление о силовом взаимодействии робота с окружающими предметами.
2. Система обратной сенсорной связи.
Она позволяет создать эффект погружения оператора в те физические обстоятельства, в которых находится робот. Когда речь идет о таком сложном устройстве, как антропоморфный робот с несколькими режимами управления, сенсорная система должна регулировать сложные механические движения, связанные, например, с равновесием и динамикой.
Управляющий костюм обеспечивает связь оператора с роботом: в прямом направлении человек управляет приводами робота, в обратном — получает информацию о внешних нагрузках на робота. При этом приводы управляющего костюма вступают во взаимодействие с мышцами человека, так что оператор может чувствовать и управлять той силой, которую Федор прилагает к выполняемым действиям. От сенсоров робота, которые измеряют скорость, угловое и линейное положение и многие другие данные, информация поступает на управляющий компьютер.
Если робот упирается рукой в стену и не может продвинуться далее, то человек через приводы управляющего костюма получает сопротивление, эквивалентное усилию своей руки. Если добавить сюда данные, получаемые от «органов зрения» и «органов слуха» робота, то эффект присутствия оператора в месте действия робота будет практически полным. За рубежом технологий такого уровня проработки на сегодняшний день не существует, говорят российский разработчики.
3. Лучшая в мире кинематика среди роботов-андроидов.
Федор — единственный антропоморфный робот, способный сесть и на продольный, и на поперечный шпагат. Механика других существующих андроидов не обеспечивает такой свободы действия, в то время как гибкость конструкции робота-спасателя необходима для того, чтобы дать ему возможность преодолевать разнообразные препятствия, например, завалы.
Также Федор — единственный в мире андроид, способный смотреть как вертикально вверх, так и строго вниз, опустив голову. Это не причуда разработчиков: высокая подвижность головного модуля позволяет роботу смотреть вперед даже тогда, когда он передвигается «по-пластунски».
4. Видеоканалы стереоскопической системы машинного зрения.
Они у робота Федора могут работать как совместно, так и раздельно. Совместная работа видеоканалов позволяет определять расстояние до объектов, а раздельная — решать не менее двух функциональных задач одновременно. Так робот может оперировать двумя разными инструментами одновременно: получая данные с правого и левого видеоканалов, он анализирует информацию о нескольких объектах и об их движении, сопоставляет дальность и производит другие вычислительные операции.
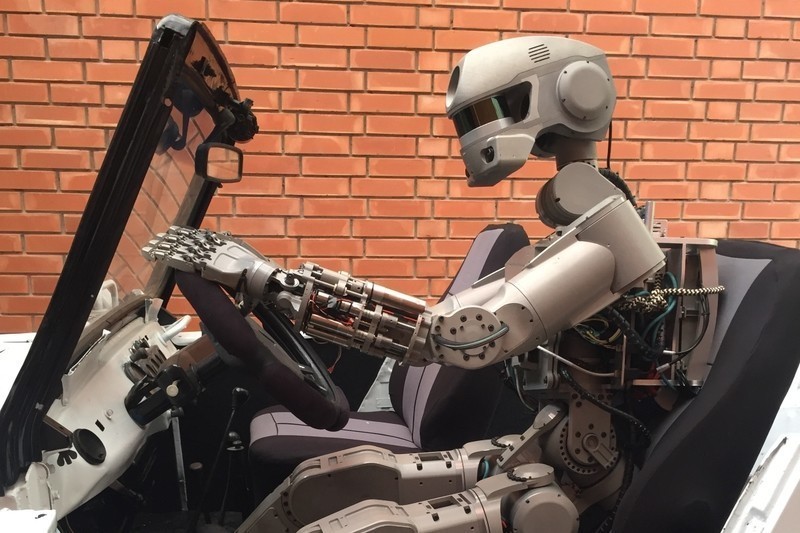
5. Высокий уровень проработки автономных программ.
Речь идет, например, о мастерстве управления транспортным средством. Федор способен самостоятельно сесть в автомобиль, снять его со стояночного тормоза и управлять им через ручную коробку передач, рулевое колесо, педали газа, сцепления и тормоза, а также поворачивать рулевое колесо с перехватом. Все эти действия Федя выполняет автономно, без участия оператора.
Механика робота позволяет воспроизвести практически любые движения человеческого тела, а программное обеспечение, включая пополняемые библиотеки, позволяет расширять профессиональные навыки андроида.
При этом самой трудоемкой задачей является обучение только первого робота: остальные экземпляры будут получать эти «знания» по умолчанию.