

Ни для кого не секрет, что одним из самых серьезных ограничений для роботов является энергия. Большинству роботов ее нужно много, и она должна откуда-то поступать, обычно источником служит аккумулятор, потому что других хороших вариантов не так много. Аккумуляторные батареи, однако, известны своей низкой плотностью энергии, и чем меньше ваш робот, тем большей проблемой это становится. В итоге проблема с батареями распространяется также и на другие компоненты робота, которые необходимы для превращения запасенной энергии в полезную механическую работу.
В статье, опубликованной на этой неделе в журнале Science Robotics, исследователи из Университета Южной Калифорнии в Лос-Анджелесе демонстрируют RoBeetle, четвероногого робота массой 88 миллиграммов, который работает на метаноле, жидком топливе высокой плотности. Главной особенностью этого робота является хитрое шасси, которое позволяет ему без использования какой-либо электроники, используя лишь пары метанола, совершать поступательное движение.
Корпус RoBeetle представляет собой топливный бак в форме прямоугольного параллелепипеда, который можно заполнить метанолом, просунув шприц через впускное отверстие для топлива. Робот представляет собой четвероногое животное с жестко зафиксированными задними лапами и двумя подвижными передними ножками, прикрепленными к единой трансмиссии, которая перемещает их одновременно, как будто покачиваясь вперед и вверх, с последующим движением назад и вниз. Трансмиссия соединена с пластинчатой пружиной, которая сжимается, чтобы оттягивать ноги назад, так что, когда робот не приводится в действие, пружина и трансмиссия удерживают его передние лапы вертикально и позволяют роботу стоять. Эти рожки предназначены в первую очередь для удержания листовой пружины на месте, но у них есть маленькие крючки, на которых можно расположить небольшой объект.
Сам привод представляет собой никель-титановый (NiTi) сплав с памятью формы (SMA), выглядящий как простая проволока, которая удлиняется при нагревании и затем сжимается обратно при охлаждении. SMA довольно распространены и используются для всех видов вещей, но что отличает этот конкретный SMA, так это то, что он "грязно" покрыт платиной. "Беспорядочная" часть важна по причине, о которой мы расскажем далее.
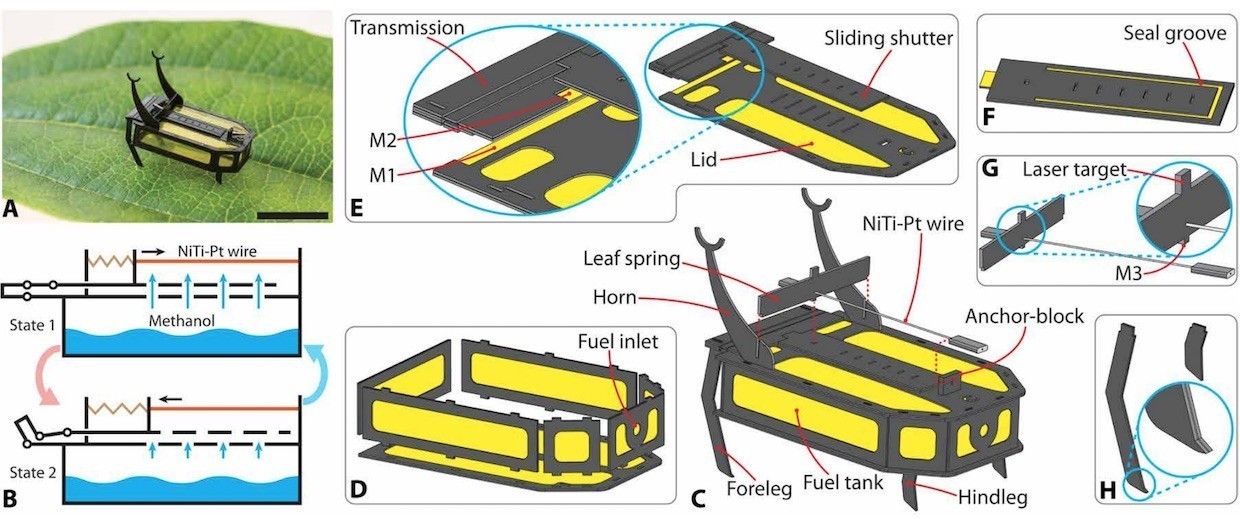
Один конец провода SMA прикреплен к середине листовой рессоры, а другой конец проходит над задней частью робота, где он прикреплен скобами к анкерному блоку на заднем конце робота. Если провод SMA подключен, но не задействован (то есть холодный, а не теплый), он достаточно короткий, чтобы листовая пружина отодвигалась назад, раскачивая ноги вперед и вверх. Последний компонент встроен в спину робота, прямо вдоль позвоночника и непосредственно под приводом SMA. Это выдвижное вентиляционное отверстие, прикрепленное к трансмиссии, так что оно открыто, когда провод SMA холодный, и пластинчатая пружина отведена назад, и закрывается, когда провод SMA теплый, а листовая пружина расслаблена. То, как раздвижное вентиляционное отверстие прикреплено к коробке передач, — действительно хитрый момент в этом роботе, потому что это означает, что движение самой проволоки используется для регулирования потока топлива через чисто механическую систему. По сути, это активатор и датчик одновременно.
Цикл срабатывания, который заставляет робота ходить, начинается с полного топливного бака и холодного провода SMA. Листовая рессора натягивается, тянет трансмиссию назад и раскачивает ноги вперед и вверх. Трансмиссия также переводит скользящее вентиляционное отверстие в открытое положение, позволяя парам метанола выходить из топливного бака в воздух, где они проходят мимо провода SMA, который проходит прямо над вентиляционным отверстием.
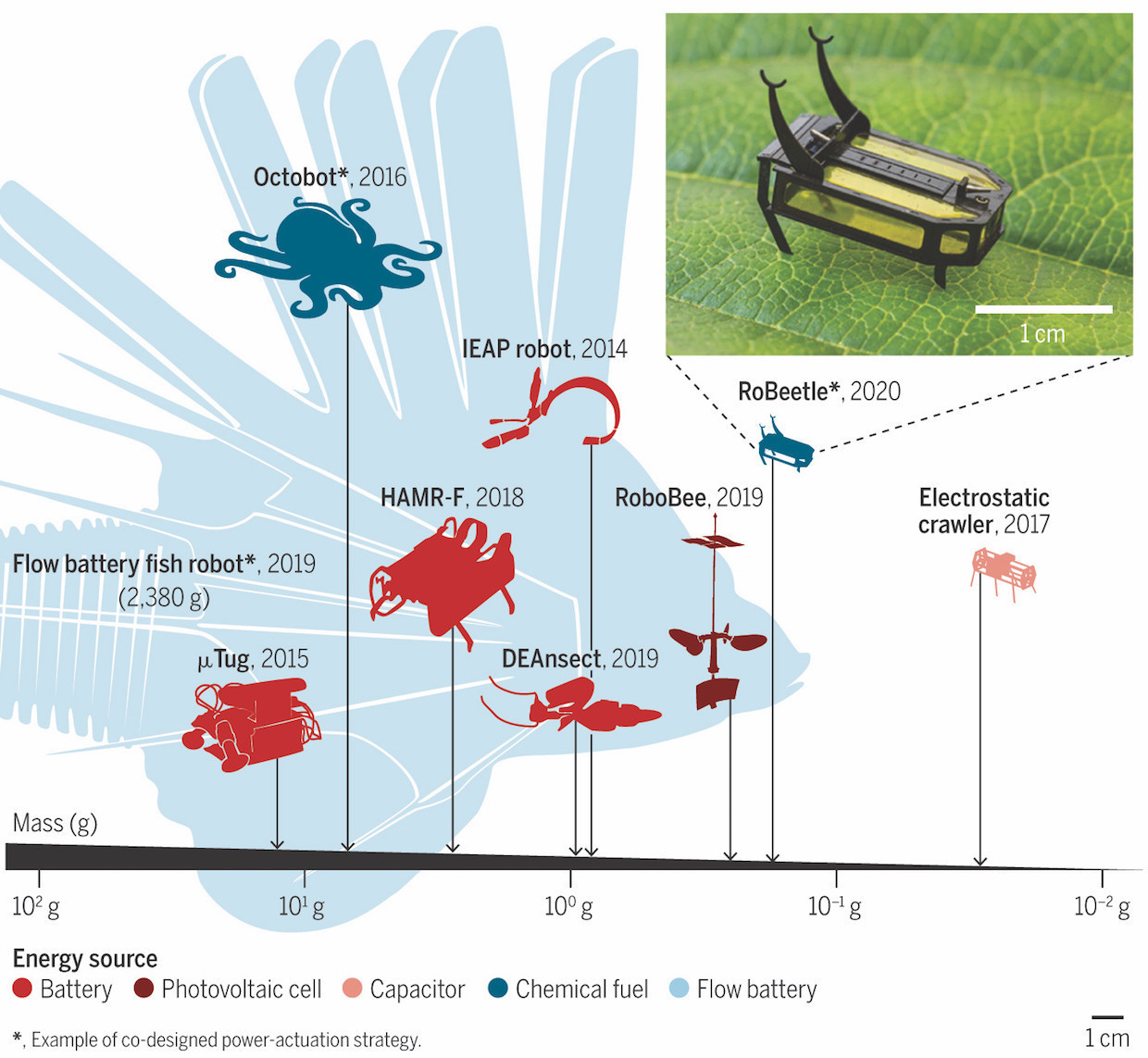
Итоговую скорость движения робота сложно назвать феноменальной — 0,76 мм / с (0,05 длины тела в секунду), но если учесть его автономность (155 минут), то это выглядит не таким уж и плохим показателем. На данный момент не существует источника питания способного обеспечить столь малые размеры при таком внушительном времени работы. И пусть данная разработка является скорее демонстрацией, использованные технологии могут рано или поздно вылиться в разработку чего-то большего. Ну, или, как минимум — в новое поколение компактных роботов.






