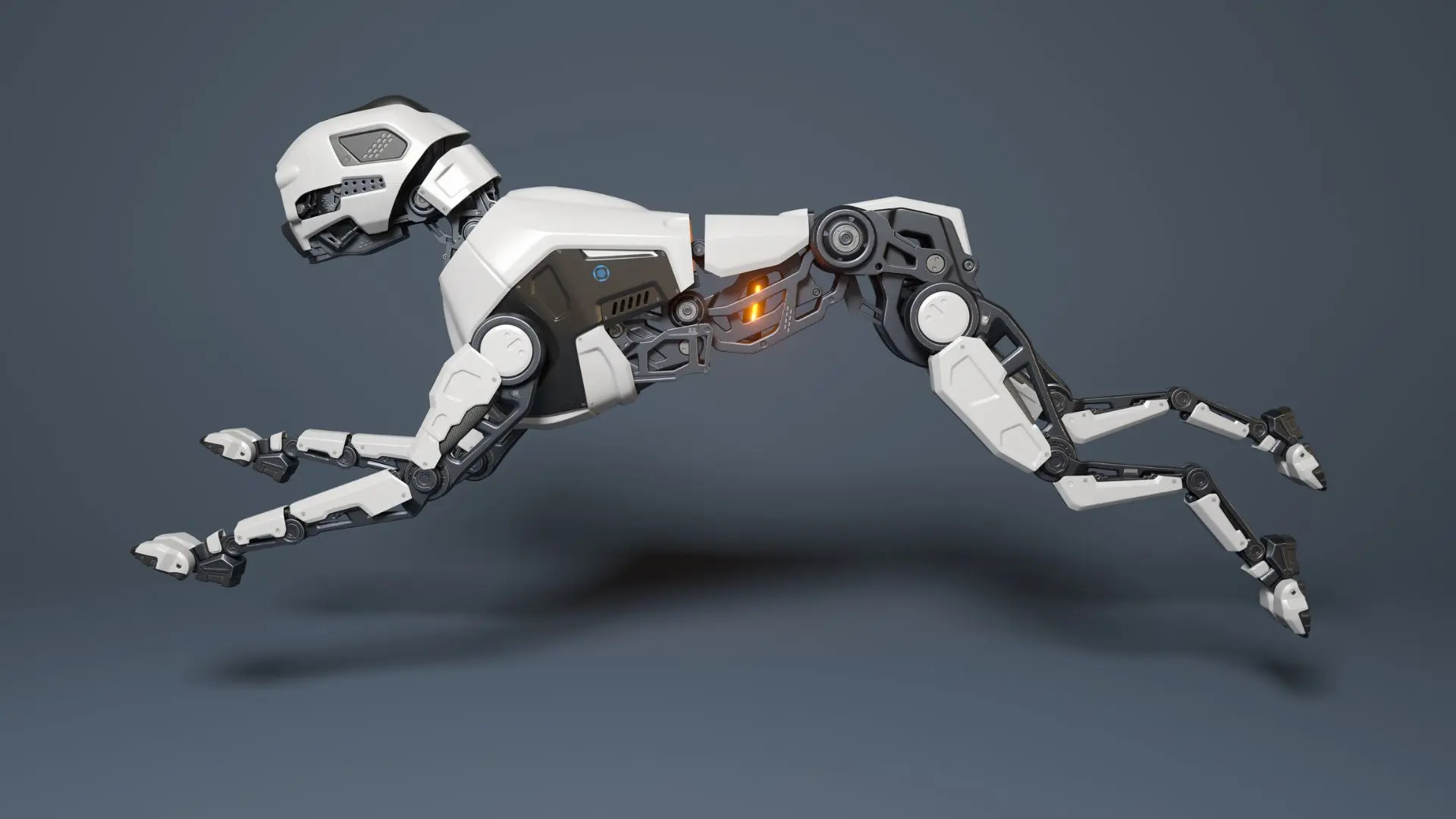
Китайские инженеры из Харбинского технологического института создали робота-собаку с искусственным интеллектом, который может прыгать по поверхности астероидов с низкой гравитацией. Идея устройства вдохновлена движениями кошек, которые всегда приземляются на лапы. Робот использует подход обучения с подкреплением и уникальную систему управления без тяжёлого стабилизирующего оборудования. Благодаря скоординированным движениям ног, он умеет корректировать положение в воздухе, изменять наклон и даже переориентироваться в новом направлении.
Решение сложностей передвижения в условиях микрогравитации стало важной частью работы. На астероидах с гравитацией, составляющей лишь тысячные доли от земной, традиционные вездеходы не могут нормально сцепляться с поверхностью. Новый робот решает эту проблему, управляя своим движением без лишнего груза и стабилизируясь за счёт интеллектуального управления ногами. Это открывает перспективы для изучения небесных тел, богатых полезными ископаемыми, такими как платина, и для понимания происхождения Солнечной системы.
Испытания проводились на платформе, моделирующей микрогравитацию, где робот отрабатывал технику приземления и корректировки траектории. Технология воздушной подвески позволила воспроизвести условия почти полного отсутствия трения, а алгоритмы ИИ помогли роботу стабильно приземляться и адаптироваться к возможным отклонениям. Так, робот успешно справился с прыжком под крутым углом, стабилизировавшись за восемь секунд и изменив ориентацию на 90 градусов.
Эта разработка открывает новые возможности в исследовании космоса. Ранее ни один аппарат не мог выполнять долгосрочные исследования поверхности малых тел, а космические миссии ограничивались краткосрочной посадкой и сбором образцов. Робот же способен прыгать на высоту, позволяющую находиться в воздухе до 10 секунд, что делает его идеальным для изучения астероидов.