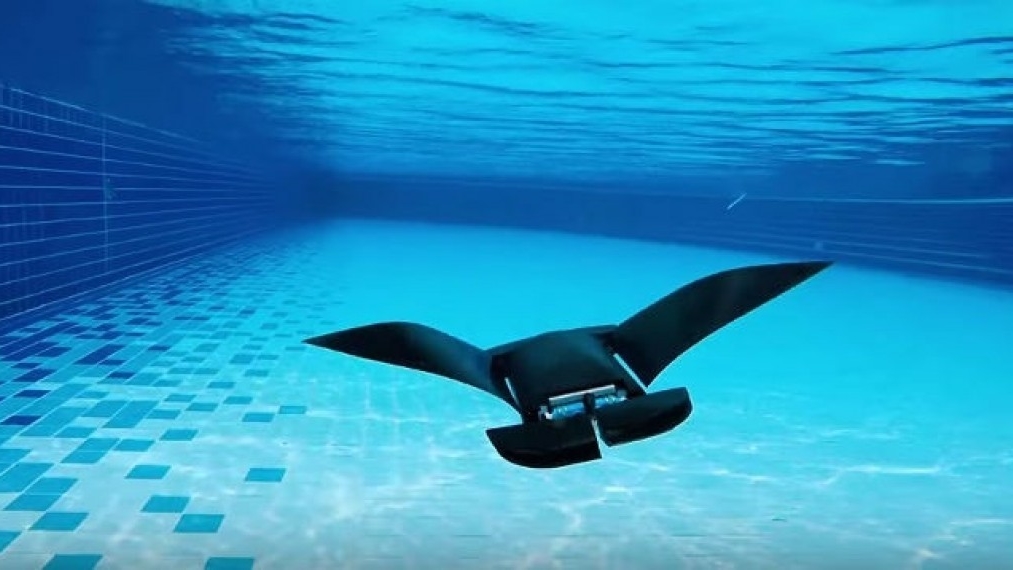
Исследователи разработали энергоэффективного мягкого робота, который может плавать более чем в четыре раза быстрее, чем предыдущие плавающие мягкие роботы, черпая вдохновение из биомеханики ската манта. Роботы, разработанные в Университете штата Северная Каролина (штат Северная Каролина), называются "ботами-бабочками", потому что их плавательные движения напоминают движения рук человека, когда он плывет баттерфляем.
Цзе Инь, автор-корреспондент документ о работе и доцент кафедры машиностроения и аэрокосмической техники в штате Северная Каролина, говорит о работе так:
На сегодняшний день плавающие мягкие роботы не могут плавать быстрее, чем на одну длину тела в секунду, но морские животные, такие как скаты манта, могут плавать намного быстрее и гораздо эффективнее. Мы хотели использовать биомеханику этих животных, чтобы посмотреть, сможем ли мы разработать более быстрых и энергоэффективных мягких роботов. Разработанные нами прототипы работают исключительно хорошо.
Исследователи разработали два типа ботов-бабочек. Один был специально создан для достижения максимально возможной скорости и мог развивать среднюю скорость 3,74 длины тела в секунду. Второй был разработан, чтобы быть очень маневренным, способным делать резкие повороты вправо или влево. Этот маневренный прототип был способен развивать скорость в 1,7 длины тела в секунду.
Исследователи, изучающие аэродинамику и биомеханику, используют нечто, называемое числом Струхаля, для оценки энергоэффективности летающих и плавающих животных. Пиковая эффективность движения возникает, когда животное плавает или летает с числом Струхаля от 0,2 до 0,4. Оба созданных робота-бабочки имели числа Струхаля в этом диапазоне.
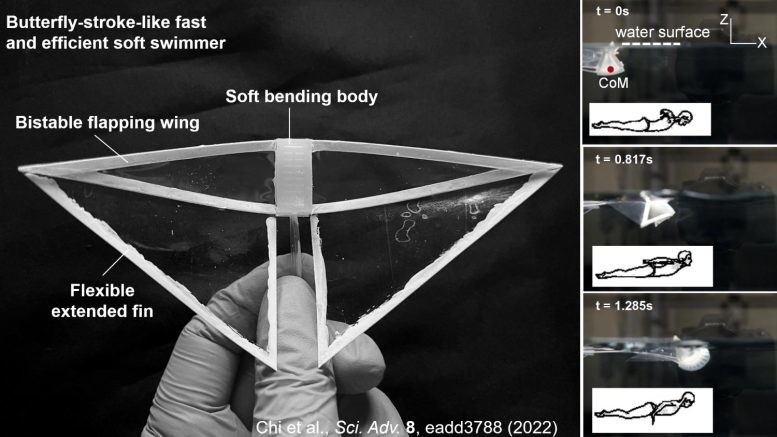
Боты-бабочки получают свою плавательную силу от своих крыльев, которые являются бистабильными, то есть крылья имеют два стабильных состояния. Крылышко похоже на заколку для волос. Заколка для волос стабильна до тех пор, пока вы не приложите к ней определенное количество энергии (изгибая ее). Когда количество энергии достигает критической точки, заколка для волос принимает другую форму, которая также является стабильной.
В роботах-бабочках бистабильные крылья в виде заколки для волос прикреплены к мягкому силиконовому корпусу. Пользователи контролируют переключение между двумя стабильными состояниями в крыльях, нагнетая воздух в камеры внутри мягкого тела. Когда эти камеры надуваются и сдуваются, тело изгибается вверх и вниз, заставляя крылья раскачиваться вместе с ним.
Исследователи отмечают, что большинство предыдущих попыток разработать машущих роботов были сосредоточены на использовании двигателей для подачи энергии непосредственно на крылья. В новом подходе используются бистабильные крылья, которые пассивно приводятся в движение движением центрального тела. Это важное отличие, потому что оно позволяет упростить конструкцию, что снижает вес.
У более быстрого робота-бабочки есть только один "двигатель" — мягкое тело, — которое управляет обоими его крыльями. Это делает его очень быстрым, но ему трудно поворачивать влево или вправо. Маневренный робот-бабочка по существу имеет два привода, соединенных бок о бок. Эта конструкция позволяет пользователям манипулировать крыльями с обеих сторон или "махать" только одним крылом, что позволяет ему совершать крутые повороты.
Эта работа — захватывающее доказательство концепции, но у нее есть ограничения. Совершенно очевидно, что нынешние прототипы связаны тонкими трубками, которые мы используем для нагнетания воздуха в центральные части. В настоящее время ученые работаеют над созданием непривязанной автономной версии.
Статья названная "Snapping для высокоскоростного и высокоэффективного мягкого пловца, похожего на баттерфляй", была опубликована в журнале Science Advances.