Когда мы говорим о роботах, то больше не всегда лучше. Когда-нибудь рой роботов размером с насекомое сможет опылить посевы (в том числе и на других планетах) или искать выживших среди обломков разрушенного здания.
Исследователи Массачусетского технологического института продемонстрировали крошечные дроны, которые могут перемещаться с похожей на жучков маневренностью и устойчивостью, и которые в конечном итоге могут выполнять эти задачи. Мягкие приводы, которые приводят в движение эти микророботы, очень прочные, но для них требуется гораздо более высокое напряжение, чем для жестких приводов аналогичного размера. Легкие роботы не могут нести необходимую силовую электронику, которая позволила бы им летать самостоятельно.
Недавно та же команда первыми разработала технику изготовления, которая позволяет им создавать мягкие приводы, которые работают с напряжением на 75 процентов ниже, чем текущие версии, и несут на 80 процентов больше полезной нагрузки. Эти мягкие приводы похожи на искусственные мышцы, которые быстро машут крыльями робота.
Эта новая технология изготовления позволяет создавать искусственные мышцы с меньшим количеством дефектов, что значительно увеличивает срок службы компонентов и увеличивает производительность и полезную нагрузку робота.
По словам разработчиков, этот шаг позволит перейти к использованию силовой электроники в микророботе. Многие склонны думать, что мягкие роботы не так полезны, как их "твердые" собратья. Но испытания показывают, что эти роботы, весом менее грамма, летают дольше всего с наименьшим числом ошибок во время полета в режиме зависания.
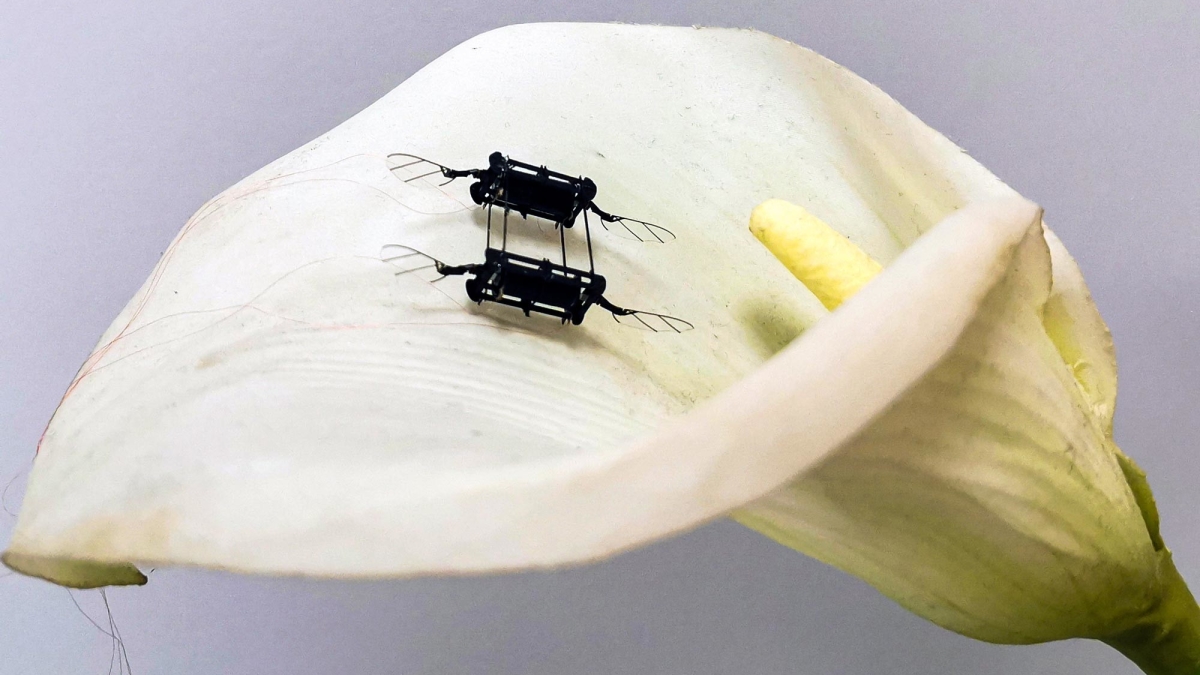
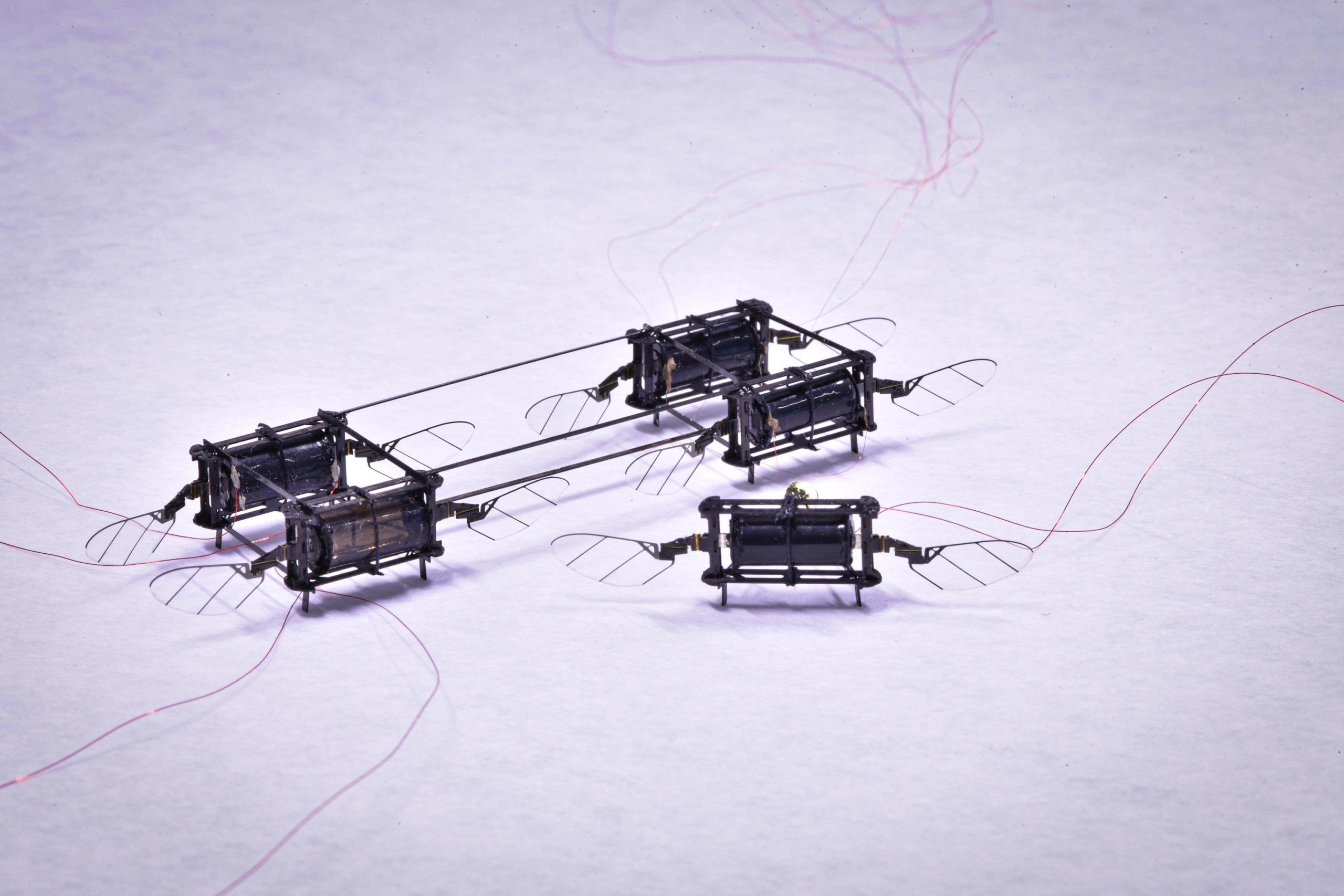
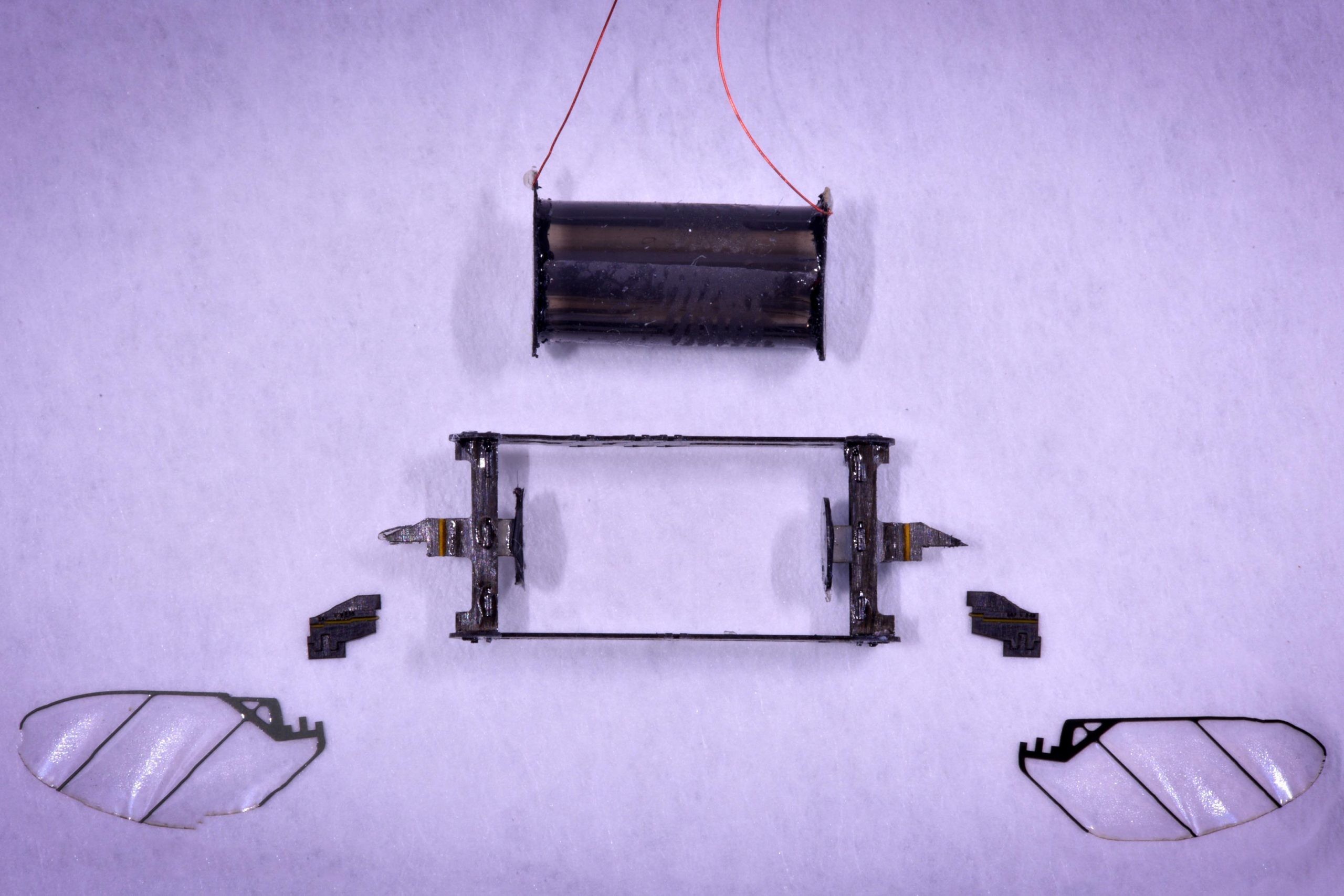
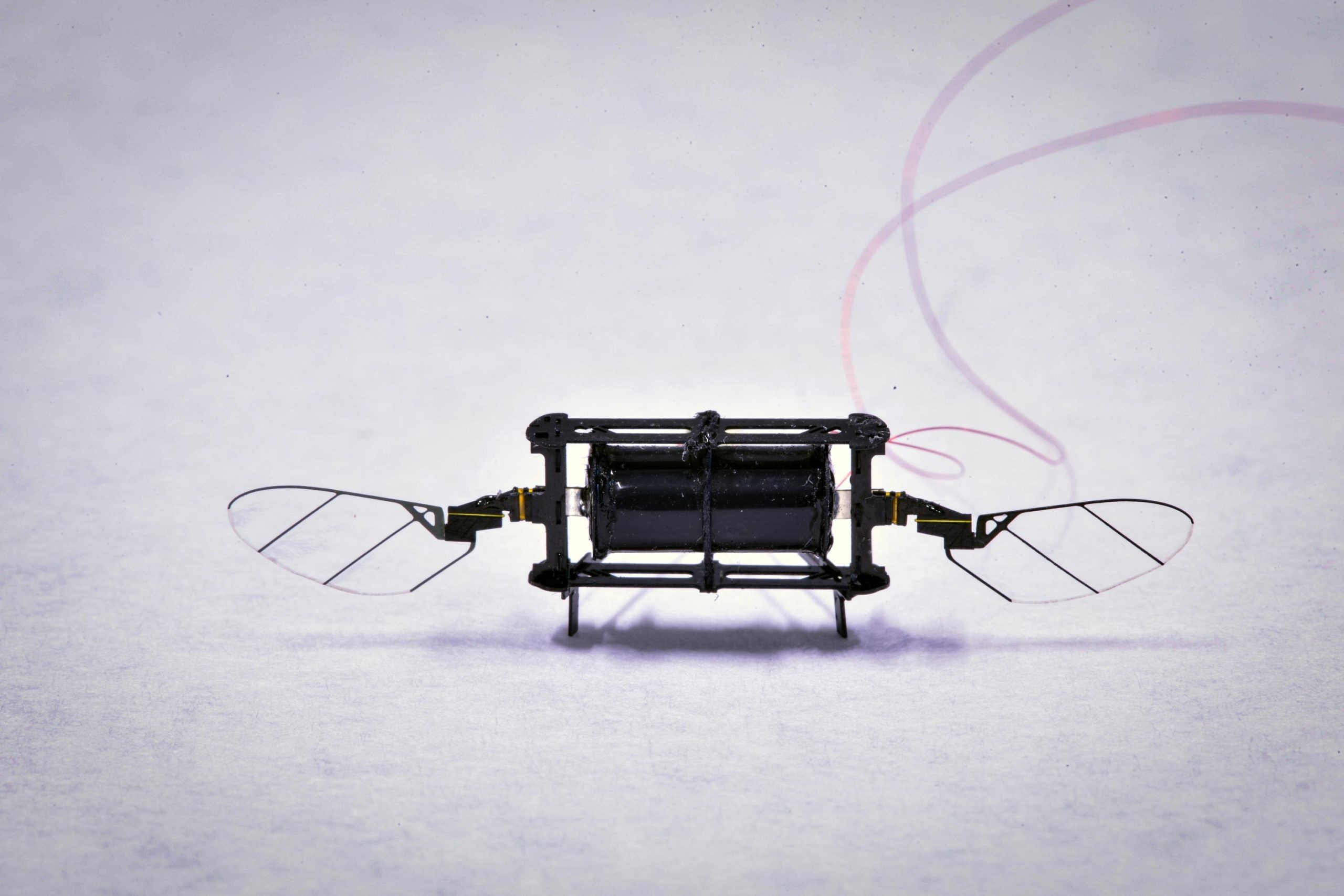
Прямоугольный микроробот, который весит менее 1 грамма, имеет четыре набора крыльев, каждый из которых приводится в движение мягким приводом. Эти мускулистые приводы сделаны из слоев эластомера, которые зажаты между двумя очень тонкими электродами и затем свернуты в мягкий цилиндр. Когда на привод подается напряжение, электроды сжимают эластомер, и это механическое напряжение используется для взмахивания крыла.
Чем больше площадь поверхности привода, тем меньше требуется напряжения. Итак, инженеры создают эти искусственные мышцы, чередуя как можно больше ультратонких слоев эластомера и электрода. По мере того, как слои эластомера становятся тоньше, они становятся более нестабильными.
Впервые исследователи смогли создать привод с 20 слоями, каждый из которых имеет толщину 10 микрометров (примерно диаметр эритроцита). Но для этого им пришлось заново изобрести части процесса изготовления.
Одним из основных препятствий стал процесс нанесения покрытия методом центрифугирования. Во время нанесения покрытия методом центрифугирования эластомер выливается на плоскую поверхность и быстро вращается, а центробежная сила вытягивает пленку наружу, делая ее тоньше.
В этом процессе воздух возвращается в эластомер и создает множество микроскопических пузырьков воздуха. Диаметр этих пузырьков воздуха составляет всего 1 микрометр, поэтому ранее конструкторы просто игнорировали их. Но когда слои становятся все тоньше и тоньше, действие пузырьков воздуха становится все сильнее и сильнее.
Исследовав это явление подробнее, удалось обнаружить, что, если они проводят процесс вакуумирования сразу после нанесения покрытия центрифугированием, пока эластомер еще был влажным, он удаляет пузырьки воздуха. Затем они запекают эластомер, чтобы он высох. По инжинеров, устранение этих дефектов увеличивает выходную мощность привода более чем на 300 процентов и значительно увеличивает срок его службы.
Исследователи также оптимизировали тонкие электроды, которые состоят из углеродных нанотрубок, сверхпрочных пучков углерода, которые составляют примерно 1/50 000 диаметра человеческого волоса. Более высокие концентрации углеродных нанотрубок увеличивают выходную мощность актуатора и снижают напряжение, но плотные слои также содержат больше дефектов.
Например, углеродные нанотрубки имеют острые концы и могут пробить эластомер, что приводит к короткому замыканию устройства. После долгих проб и ошибок исследователи нашли оптимальную концентрацию.
После использования этой техники для создания 20-слойной искусственной мышцы, инженеры проверили ее в сравнении со своей предыдущей шестислойной версией и современными жесткими приводами.
Во время экспериментов с отрывом 20-слойный актуатор, для работы которого требуется менее 500 вольт, выдавал достаточно энергии, чтобы обеспечить роботу отношение подъемной силы к весу 3,7: 1, так что он мог нести предметы, которые почти в три раза превышают его вес.
Они также продемонстрировали 20-секундный полет в режиме зависания, который, является самым продолжительным, когда-либо зарегистрированных для роботов весом менее грамма. Их парящий робот держался стабильнее, чем любой другой. Привод с 20 слоями все еще работал без сбоев после более чем 2 миллионов циклов, что намного превышает срок службы других приводов.
Сейчас команда разработчиков надеется на сотрудничество с Niroui в создании приводов в чистой комнате MIT.nano и использовании технологий нанопроизводства. Теперь команда ограничена тем, насколько тонкими они могут сделать слои из-за пыли в воздухе и максимальной скорости нанесения покрытия. Работа в чистом помещении устраняет эту проблему и позволяет им использовать такие методы, как нанесение лопаток, которые более точны, чем нанесение покрытия центрифугированием.
Если план удастся воплотить, то показатели микроботов станут достаточными для начала их более массовых испытаний с потенциальным продолжением в виде конвейерного производства и внедрения в целевые сферы. Как знать, может именно такие вод роботизированыне труженники будут опылять первые поля пшеницы на Луне или Марсе.