Крошечные насекомоподобные организмы, ногохвостки — это мягкотелые беспозвоночные с шестью ногами и одним странным органом, который каждый день защищает их от хищников. Этот прыгательный орган на нижней стороне тела шлепает по воде и подбрасывает животное в воздух на высоту, в десять раз превышающую его собственный рост. Он вращается в воздухе, чтобы исправить свое положение, и плавно приземляется обратно на воду в вертикальном положении.
Группа исследователей из Технологического института Джорджии выяснила механику движения: от прыжка до самовосстановления и, наконец, приземления. Они использовали комбинацию методов моделирования и реальных испытаний ногохвостов, а затем, совместно с исследователями из Университета Аджу в Южной Корее, смогли построить крошечных прыгающих роботов.
Эти эксперименты могут продвинуть несколько областей техники, включая робототехнику и аэродинамику, говориться в исследовании опубликованном на сервисе Proceedings of the National Academy of Sciences.
Ногохвост может не только регулировать угол своего прыгательного органа, вилочки, когда взлетает, но и приземляться на трубчатый придаток, называемый гидрофильным коллофором, который удерживает воду и прилипает к поверхностям, позволяя животному прилипать к поверхности. Находясь в воздухе, ногохвостки изгибаются в U-образную форму, которая создает аэродинамический крутящий момент, силу, которая заставляет их тело вращаться вокруг своей оси, пока оно не окажется правильной стороной вверх. Это самовосстановление происходит всего через 20 миллисекунд после прыжка — быстрее, чем это может сделать любой другой бескрылый организм.
Команда черпала вдохновение из природных способностей ногохвостов и создала математическую модель физики, связанной с их движениями, включая поверхностное натяжение, инерцию, плавучесть, сопротивление, капиллярное рассеяние и силы сцепления. Они рассчитали, как ногохвостка создает устойчивые посадки, высвобождая энергию через рябь на поверхности воды. Команда обнаружила, что ногохвостки могут контролировать угол своего взлета и скорость. Они включили эту информацию в математическую модель.
Полученное компьютерное моделирование показывает, что угол наклона тела является ключом к плавному приземлению и скольжению по коллофору, который собирает капли воды для обеспечения стабильной езды. Затем команда поместила настоящих ногохвостов, как живых, так и мертвых, в аэродинамическую трубу и бросила их в свободном падении. Как и в их модели, они обнаружили, что волшебная комбинация для приземления без ударов включала U-образную позу животных и приземление на коллофор. Аэродинамическая труба и свободное падение не повлияли на их характеристики.
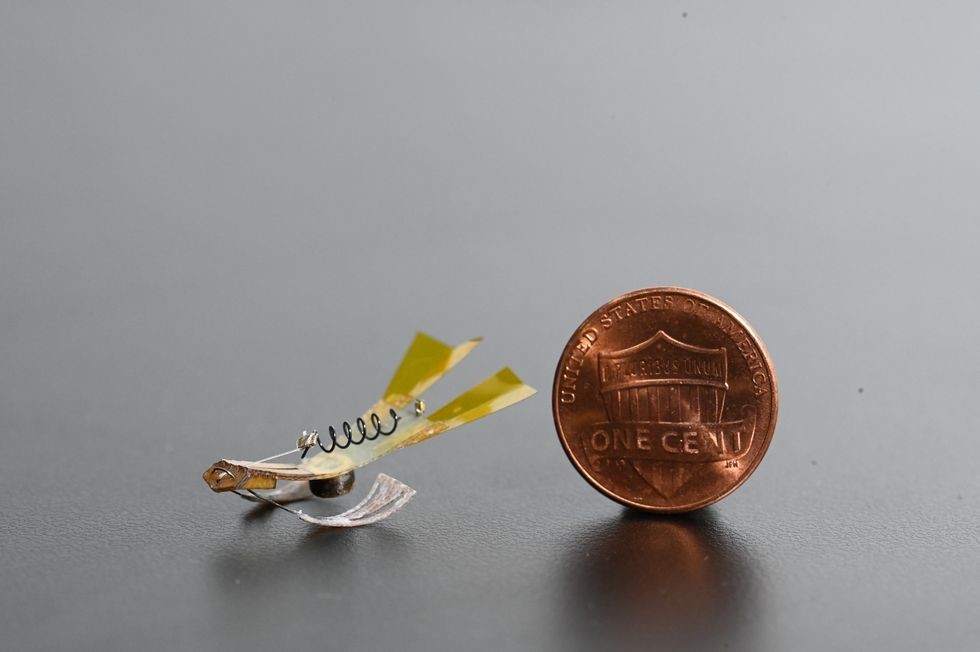
Используя экспериментальные модели и данные реальных ногохвостов, исследователи Технологического института Джорджии в сотрудничестве с командой из Университета Аджу спроектировали и построили небольшого аэродинамического прыгающего робота с аналогичным пониженным центром тяжести. Но эти ранние роботы слишком сильно вращались и не могли приземлиться правильно.
Таким образом, у следующего робота были тормозные заслонки, приспособления к основному телу, которые уменьшали его вращение. Теперь он мог приземлиться на ноги. Когда они протестировали этих модифицированных роботов, команда подтвердила, что коллофор и форма тела необходимы для приземления. Несмотря на то, что они достигли стабильности, роботы не были такими искусными, как ногохвостки, достигнув 75-процентного показателя успеха по сравнению с 85-процентным показателем идеальных приземлений у ногохвостов во время испытаний.
Тем не менее, это исследование имеет значение для понимания телесного контроля в небольших масштабах. Авторы надеются углубиться в гидродинамику и образование волн полуводными ногохвостами, когда они прыгают и приземляются на поверхность воды. Еще один следующий шаг — изучить реакцию ногохвостов на встречу с естественными хищниками и спроектировать гибкого прыгающего робота, который может деформировать свое тело и прилипать к поверхности.
Исследователи говорят, что их результаты могут стать толчком для появления прыгающих роботов размером с насекомое, способных безопасно приземляться, и расширить возможности роботов в новых ландшафтах, таких как открытые водные поверхности в озерах и океанах.